მარსისთვის შექმნილ ახალ ოთხფეხა რობოტს ციცაბო ფერდობებზე შეუძლია ცოცვა
ფოტო: wp-assets.futurism.com
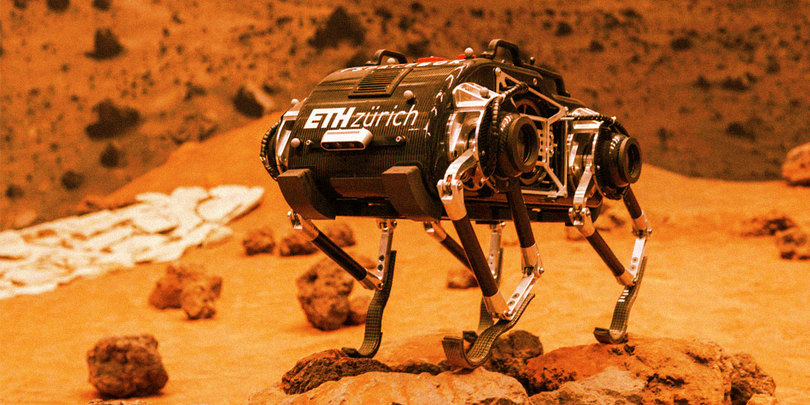
ციურიხის ფედერალური ტექნოლოგიების ინსტიტუტისა (ETH Zurich) და მაქს პლანკის ინსტიტუტის ინჟინრებმა პატარა ოთხფეხა რობოტი შექმნეს, რომელსაც, Apollo-ს ასტრონავტების მსგავსად, მთვარის ზედაპირზე უნდა გაევლო.
ახლა, როგორც Wired იუწყება, მეცნიერები მას მარსის პირობების შესაბამისად ცვლიან — წითელ პლანეტაზე მას ბევრად მეტ გრავიტაციასთან და რთულ რელიეფთან მოუწევს გამკლავება. მოხეტიალე Spacebok-ს ეს სახელი ანტილოპა სფრინგბოკის გამო დაერქვა.
იმ შემთხვევაში, თუ Spacebok ოდესმე მოხვდება მარსზე, მოსიარულე რობოტმა, შესაძლოა, პლანეტის იდუმალი გამოქვაბულებისა და რთული რელიეფების აღმოჩენა შეძლოს, რომლამდე მიღწევაც ბორბლებიანი მოხეტიალეებისთვის შეუძლებელია.
წითელი პლანეტის ზედაპირის ქვიშიანი და ციცაბო ფერდობები ამ რელიეფს რთულ გადასალახს ხდის ოთხფეხა რობოტისთვისაც. თუმცა, სპეციალური სიარულის მანერისა და სხვადასხვა ტიპის ფეხების საშუალებით, შესაძლოა, Spacebok-მა ამ სირთულეების დაძლევა მოახერხოს.
ინჟინრებმა რობოტისთვის მარსის მსგავსი გარემოს შექმნეს, სადაც, ბრტყელი ფეხების გამოყენებით, მან 25 გრადუსით დახრილ ზედაპირზე შეძლო ასვლა.
"ერთ-ერთი მოულოდნელი აღმოჩენა ის იყო, რომ, მიუხედავად ქვიშიანი ზედაპირისა, ფერდობზე ასვლისას რობოტი მახვილი ფეხებითაც არ გადაადგილდებოდა ცუდად", — განუცხადა Wired-ს ETH Zurich-ის რობოტიკის სპეციალისტმა და ასოცირებული მოხსენების მთავარმა ავტორმა, ჰენდრიკ კოლვენბახმა. "მახვილ ფეხებს საკმაოდ სტაბილური მდგომარეობის უზრუნველყოფა შეუძლიათ".
გუნდმა აღნიშნა, რომ ბრტყელი ფეხებით სიარულისას მოხეტიალეს მეტი ენერგიის გამოყენება დასჭირდა, ამიტომ ახლა ისინი ბრტყელ და მახვილ ფეხებს შორის რაიმე შუალედურ ვარიანტის მოძებნას ცდილობენ.
მარსის მფრინავებთან ერთად, მოსიარულე რობოტები პლანეტის ბევრი იდუმალი და ჯერჯერობით მიუწვდომელი ადგილის აღმოჩენას შეძლებენ.










კომენტარები